Runs tasks sent by the taskUser file. More...
Functions | |
| def | taskMotor.taskMotorFcn (taskName, period, mFlag, MFlag, cFlag, wFlag, duty, delta, controlParameters, cLoopFeedback) |
| Performs the tasks as determined by the taskUser file. More... | |
Detailed Description
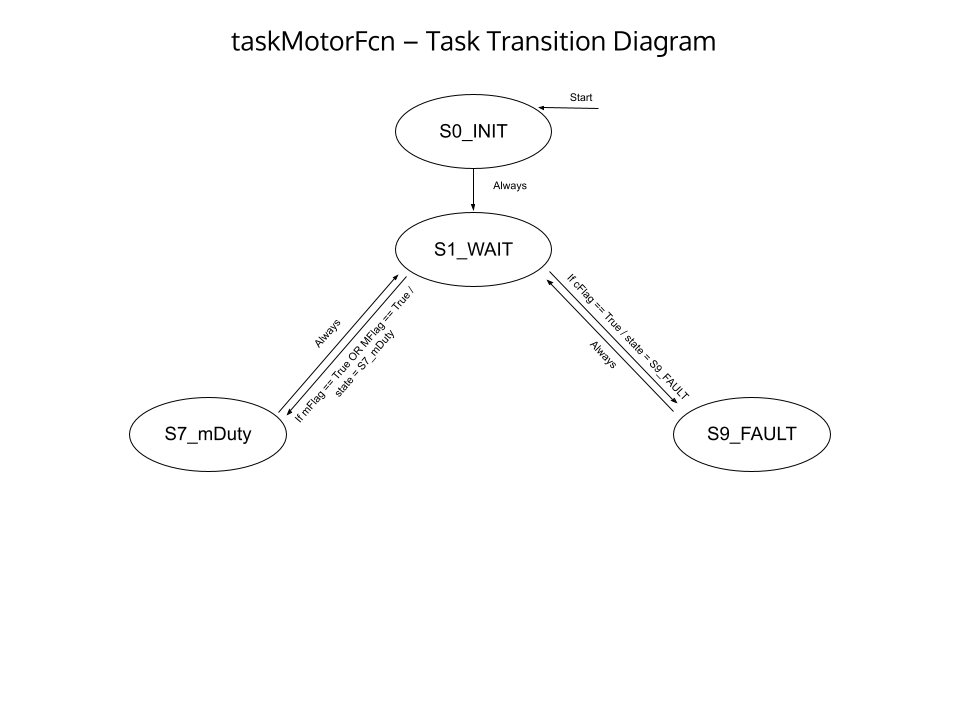
Runs tasks sent by the taskUser file.
Acts as a background function file controlling the motor for the primary user interface so that the user interface does not have to perform tasks directly.
The State Transition Diagram for taskUser can be seen here.

Source Code: https://bitbucket.org/lmurray03/me305_lucas_murray/src/master/Lab%200x03/taskMotor.py
- Date
- February 16, 2022
Function Documentation
◆ taskMotorFcn()
| def taskMotor.taskMotorFcn | ( | taskName, | |
| period, | |||
| mFlag, | |||
| MFlag, | |||
| cFlag, | |||
| wFlag, | |||
| duty, | |||
| delta, | |||
| controlParameters, | |||
| cLoopFeedback | |||
| ) |
Performs the tasks as determined by the taskUser file.
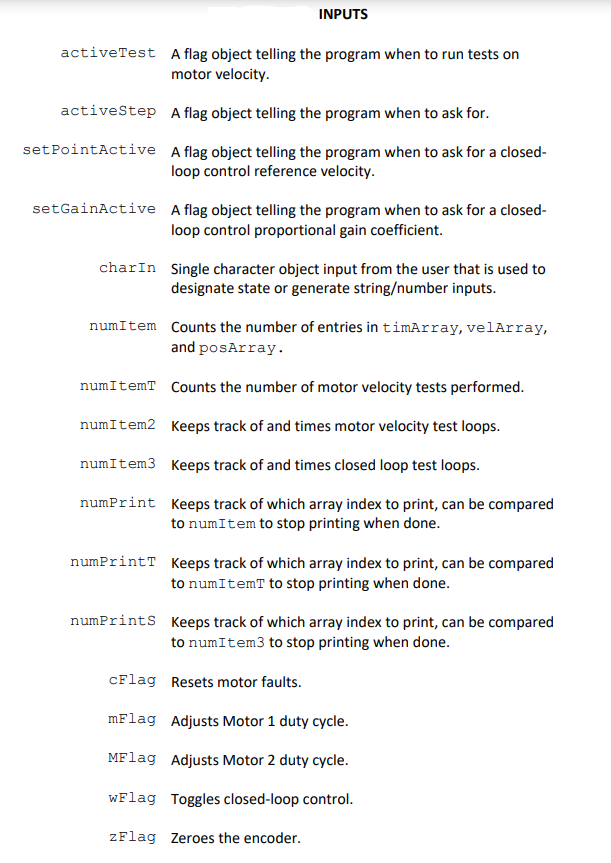
Interfaces with the taskUser file through the use of the shared flag parameters and shared values, being able to change the motor duty cycles and clear faults as well as toggling and updating the closed loop controller.
- Parameters
-
taskName The name of the task a string mFlag Boolean variable shared between taskUser and taskMotor for the motor1 duty cycle command MFlag Boolean variable shared between taskUser and taskMotor for the motor2 duty cycle command cFlag Boolean variable shared between taskUser and taskMotor for the reset fault command wFlag Boolean variable shared between taskUser and taskMotor for the closed loop control toggle command duty Tuple shared between taskUser and taskMotor that stores the input duty value delta Tuple shared between taskUser and taskEncoder that stores delta data controlParameters Tuple shared between taskUser and taskMotor that stores the input reference velocity and proportional gain cLoopFeedback Tuple shared between taskUser and taskMotor that stores the closed loop error feedback from each update