Runs a user interface for someone to run the encoder. More...
Functions | |
| def | taskUser.taskUserFcn (taskName, period, zFlag, mFlag, MFlag, cFlag, wFlag, data, delta, duty, controlParameters, cLoopFeedback) |
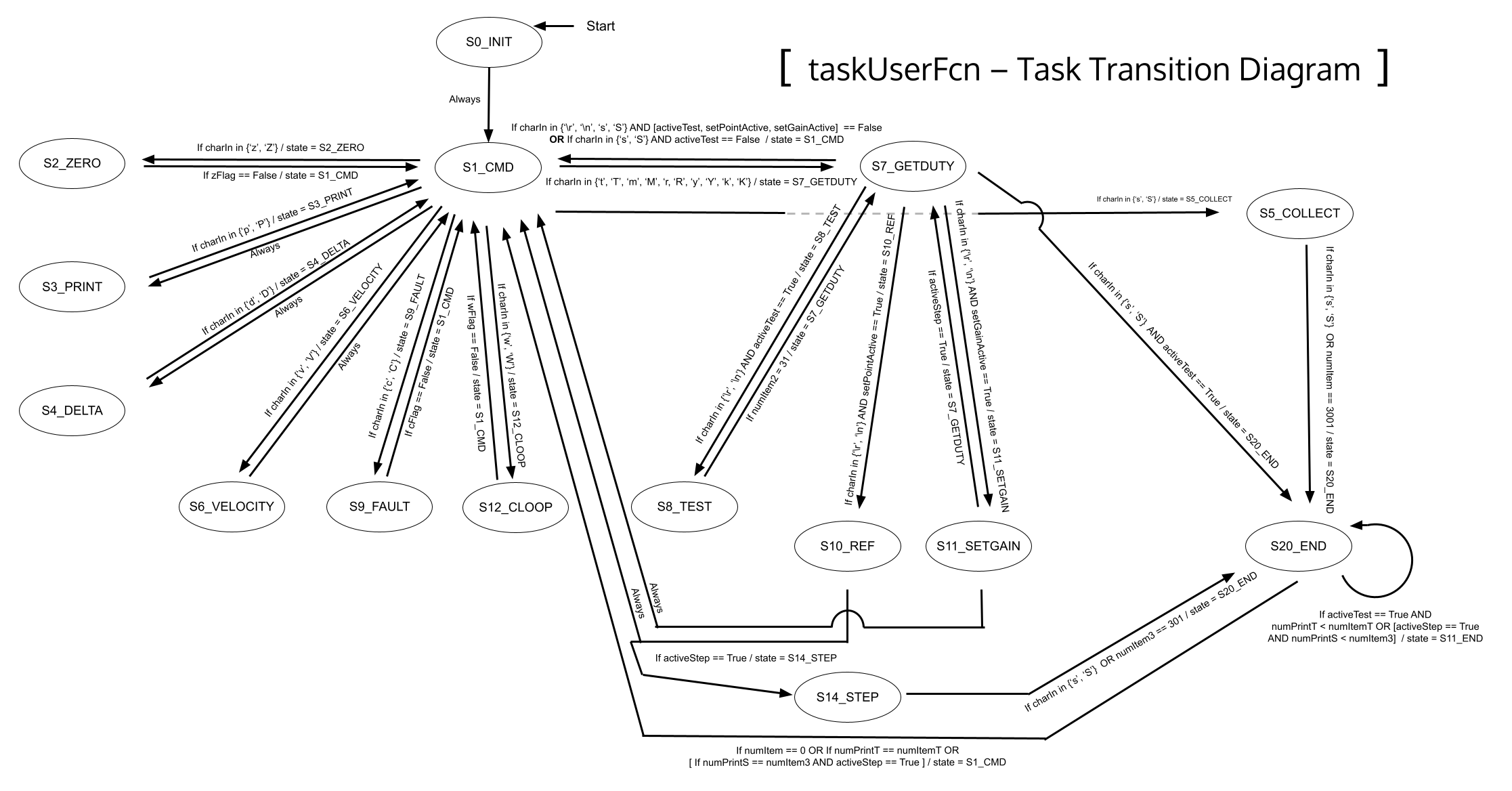
| A generator to implement the UI task as an FSM. More... | |
| def | taskUser.printUI () |
| Prints the command screen for the user interface. | |
Detailed Description
Runs a user interface for someone to run the encoder.
Uses a function to accept user input and run the desired method. Uses the shared variables to read data written by the encoder and motor tasks and to send flags that will tell either of the functions to perform a certain action.
The State Transition Diagram for taskUser can be seen here.
Source Code: https://bitbucket.org/lmurray03/me305_lucas_murray/src/master/Lab%200x02/taskUser.py
- Date
- February 24, 2022
Function Documentation
◆ taskUserFcn()
| def taskUser.taskUserFcn | ( | taskName, | |
| period, | |||
| zFlag, | |||
| mFlag, | |||
| MFlag, | |||
| cFlag, | |||
| wFlag, | |||
| data, | |||
| delta, | |||
| duty, | |||
| controlParameters, | |||
| cLoopFeedback | |||
| ) |
A generator to implement the UI task as an FSM.
The task runs as a generator function and requires a task name, interval and zFlag status to be specified.
- Parameters
-
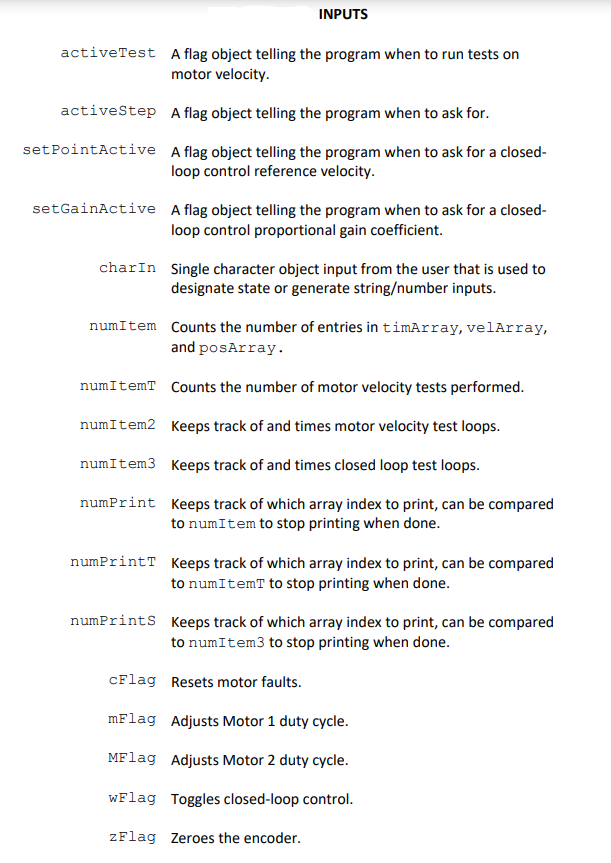
taskName The name of the task as a string. period The task interval or period specified as an integer number of microseconds. zFlag Boolean variable shared between taskUser and taskEncoder for the zero command mFlag Boolean variable shared between taskUser and taskMotor for the motor1 duty cycle command MFlag Boolean variable shared between taskUser and taskMotor for the motor2 duty cycle command cFlag Boolean variable shared between taskUser and taskMotor for the reset fault command wFlag Boolean variable shared between taskUser and taskMotor for the closed loop control toggle command data Tuple data shared between taskUser and taskEncoder for data collection delta Tuple shared between taskUser and taskEncoder that stores delta data duty Tuple shared between taskUser and taskMotor that stores the input duty value controlParameters Tuple shared between taskUser and taskMotor that stores the input reference velocity and proportional gain cLoopFeedback Tuple shared between taskUser and taskMotor that stores the closed loop error feedback from each update